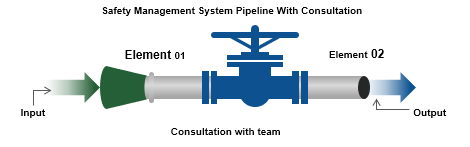
PID制御アルゴリズムはマネジメントシステムのコントロールに使える。「過去(積分)動作」、「現在(比例)動作」、「未来(微分)動作」マネジメントシステムのコントロール(操作)量を決定

PID制御アルゴリズムはマネジメントシステムのコントロール
Table of Contents(コンテンツ目次)
リーダーに必要なマネジメントシステムにリーダーに特定される傾向は?
成果を出し、自らを成長させたい人、習慣を変えたい人、自分の強みを活かしたい人といろいろな人がいます。多くのビジネス書物は経営者のためだけではありません。それはリーダーに特定された傾向はありません。リーダーは先天的な資質を持っているからではなく、後天的な資質で十分です。人は、「性格、姿勢、価値観、強み、弱みのすべてが千差万別」、「外交的な人から内向的な人、頭の柔らかな人から硬い人、大まかな人から細かな人」です。
リーダーには何が問われるのか。
「やりたいことをする」が問われるのではなく、「やるべきことをやる」ことが問われます。でも、実行に際して、以下の(括弧内)がとっても重要です。
(1)(私がやるのではなく)なされるべきことを考慮する。
(2)(私たちが働く)組織のことを考える
(3)(私たちが)アクションプランをつくる
(4)(私と私たちで)意思決定を行う
(5)(私たちは成果出しのために)コミュニケーションを行う
(6)(気が付いた人、ひらめいた人のopportunityに応じ)機会に焦点を合わせる
(7)(私と私たちで)会議の生産性をあげる成果につなげる
(8)(リーダーは)「私は!」ではなく「私たちは」を考える
リーダーには何が必要なのか。
- リーダーには意欲的なフォロワーがいます。
他者からの支持を得ずにリーダーは存在しません。フォロワーがいるからこそリーダーが成り立つ自然法則です。 - リーダーシップは相互作用の分野です、つまりリーダーとフォロワーの間の関係です。
リーダーシップは、人、立場、プログラムではなく、リーダーとフォロワーが結びついて1 つの全体を形成するときの関係です。 - リーダーシップは出来事、出会いとして発生します。
リーダーシップはリーダーとフォロワーの関係として存在し、これらの関係は一時的な出来事、出会いです。 優れたリーダーとみなされている。人は、一般的に一連のリーダーシップイベントで成功を収めており、支持者の立場を維持することに努めています。 - リーダーは権限を超えて影響力を行使します。
マネージャーは方向性を示しますが、リーダーは既存の手順で定められた以上の方向性を示します。 孫子の『兵法』の言葉を引用して、「道が続くところに従うのではなく、代わりに道のないところを導き、道を残しなさい。」 - リーダーシップにはリスクと不確実性が伴います。
リーダーシップの現実は、誰かが所定の手順を逸脱して行動する場合、その分野の一部であるリスクを受け入れことが求められます。 - 誰もがリーダーのイニシアチブに従うわけではありません。
これはリーダーシップの最も重要な限界の 1 つです。 エイブラハム・リンカーン、ガンジー、マーティン・ルーサー・キング博士のような有名なリーダーであっても、全員からの支持を得られるリーダーはいないでしょう。
- 入ってくる情報を処理すること、これがリーダーシップを生み出します。
リーダーの考え方は異なります。 リーダーは他の人が気づいていない機会や障害を克服する方法に気づいています。 リーダーシップの方向性が人々に有益であると認識させたとき、リーダー人に受け入れられます。
- リーダーシップは自己反映(言及)のプロセスです。
リーダーとフォロワーは、自分自身の主観的な内部を見てそれに基づいて情報を処理します。 すべてのリーダーは、自分独自のメガネから会社、世界を見ています。フォロワーがリーダーに共感するのは、リーダーのあるべき姿を見たとき、それがフォロワーの自己イメージに適合するからです。
さて、ここからは、すべてのシステムに起きる外乱・内乱をどのように補正するか、

マネジメントシステムのフィードバック制御、フィードフォワード制御にPID制御アルゴリズム思考の適用
フィードフォワードを使っていますか?
例として、制御するマネジメントシステムの社員の活動における何らかの特性 (職場の業務取組みへの温度差など) を測定します。それを望ましい値 (設定点) と比較し、プロセスへの入力として必要な変更があれば、それを評価(計算)します。そしてそれらの入力 (可変ヒーターなど) を適切に調整します。
フィードフォワード制御では、最初に外乱があるかないか、外乱は強いか弱いかを測定することによって、プロセスに対する大きな外乱の影響を予測・評価し、それらによるリスク損失を補償することができます。
図はフィードバック制御とフィードフォワード制御の概略を示しています。(大事なことはフィードバック制御とフィードフォワード制御の両方が必要ということです)。フィードバックは頻繁に使われ、フィードフォワードの頻度は少ないことはリスクとなります)
以下は概念図に使われている用語の説明:
Measurement:
プロセスには幅広いオンライン測定装置 (センサー) が存在しており、最も一般的なのは、流量、圧力、液面、温度、pH、およびその他の化学組成の選択的測定を行うものです。職場のセンサーは何でしょうか?
Controller:
コントローラーはPID (Proportional-Integral-Differential Controller、PID Controller比例制御-積分制御-微分制御)はプロセスの制御用途に使われます。(人が物事を判断する時には、「過去」「現在」「未来」の3要素を考慮して結論を出します。)
Final Element:
コントローラーによって計算された制御アクション信号は、システムへ適切な入力の変更をするデバイスであるFinal Element(最終制御要素)に送信されます。(この可変入力はプロセスでは通常、燃料、空気、冷却剤、反応物質などの 流量です)
制御システムのパフォーマンス低下となる一般的な問題は以下が含まれます。 不適切または不正確な測定、 プロセスまたは測定のいずれかの長時間の遅延、 システムの変動または非線形の性質、 いくつかの準独立した制御ループの相互作用。
Process:
プロセスを新しいステータスに進めたり、ステータスを変更せずにデータ (メモなど) をプロセスに追加したりするアクティビティです。処理には、手動、自動、および任意の 3 種類があります。
マネジメントに概念図のロジックを活用する時
マネジメントに上の概念図のロジックを活用する時に、過去・現在・未来の視点を使う、PID制御アルゴリズムは「過去⇒I(積分)動作」、「現在⇒P(比例)動作」、「未来⇒D(微分)動作」の3要素から判断し、マネジメントシステムのコントロール(操作)量を決定するように活用します。
20 世紀のオートメーションの発達は、プロセス制御の重要なマイルストーンとなりました。
PIDループ基本図: 出典 setra.com

PID制御のブロック線図
この図中ではt:時間、u:操作量、r:目標値、y:出力値、e:偏差
(PID:比例・積分・微分) コントローラーなどの自動制御システムの導入は、プロセス制御革命となりました、経営には何がもたらされたのでしょうか?
これらのシステムはプロセス変数を監視し、プロセスパラメータを自動的に調整することで、手動介入、任意介入の必要性を排除し、運転の効率と安全性を向上させることができました。
現在、プロセス制御システムは AI や機械学習などの高度なテクノロジーを利用してプロセスのパフォーマンスを向上させ、プロセス産業が最適な効率、安全性を実現できるようにしています。


コメントを投稿するにはログインしてください。